Конструктивные элементы деревообрабатывающих станков
Деревообрабатывающий станок — сочетание механизмов, обеспечивающих различные движения, которые необходимы для выполнения определенной работы. Движения различают главные и подачи.
Главным называется движение, определяющее рабочий процесс, а подачей — движение, необходимое для повторения главного движения.
Для осуществления движений в рабочих машинах существуют три вида механизмов: двигательные — электро-, гидро- или пневмодвигатели (приводы); передаточные — для передачи энергии от двигательного механизма к исполнительному с помощью механических, гидравлических, пневматических или других передач; исполнительные — для перемещения элементов машин, выполняющих основные и вспомогательные движения, необходимые для осуществления рабочего процесса.
Кроме механизмов в состав станков входят также станины, опорные элементы, ограждения, приборы контроля и управления и т. п.
Для изображения машины применяют кинематические (К), гидравлические (П), пневматические (П), электрические (Э) и комбинированные (С) схемы и рабочие чертежи станка, сборочных единиц и деталей.
Кинематической называют схему, изображающую способ передачи движений от двигательного механизма к исполнительному, пневматической или гидравлической — схемы, изображающие состав и соединение элементов, которые входят в состав гидравлических или пневматических механизмов станка. Электрической схемой изображают соединения электрических элементов станка. С помощью кинематических, гидравлических, пневматических и электрических схем станка можно проследить взаимодействие всех механизмов станка.
Механизмы главного движения (рис. 1) обеспечивают движение режущему инструменты или заготовке, необходимое для осуществления требуемого технологического результата. Механизмы главного движения разделяются на вращательные, поступательные и возвратно-поступательные. В механизмах вращательного движения режущий инструмент в виде ножевого вала (рис. 1,а), круглых пил (рис. 1,б,г), сверла (рис. 1, в,д) получает вращение от двигателя (М) через клиноременную передачу или непосредственным соединением вала двигателя и инструментов (рис. 1, в). По схеме рис. 1, е работают лущильные станки. В механизмах поступательного движения режущий элемент в виде гибкой непрерывной ленточной (рис. 1, ж) или цепной пилы, шлифовальной шкурки (рис. 1, з) перемещается за счет фрикционной связи с шкивами, получающими вращение от двигателя.
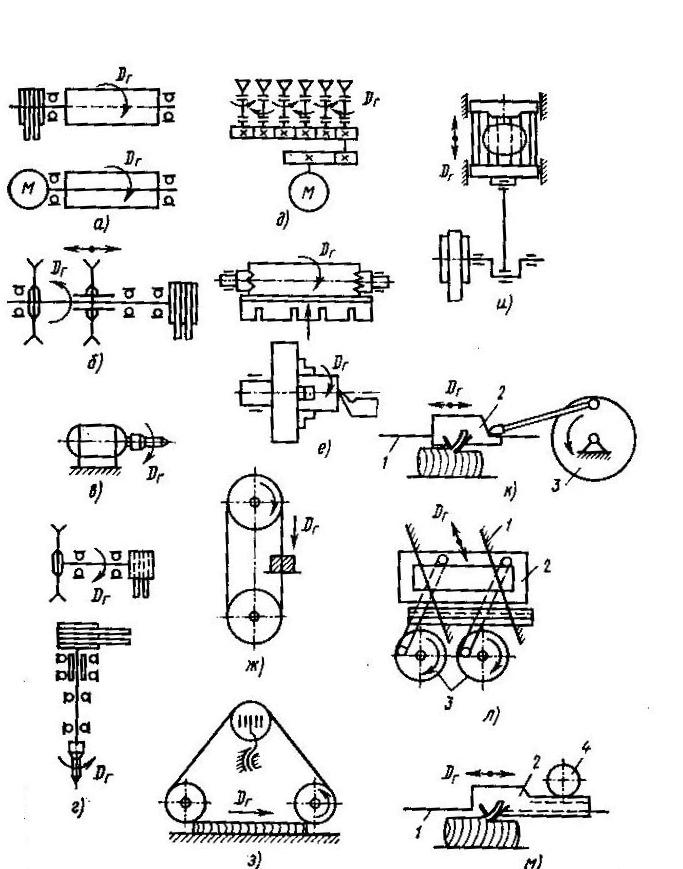
Рис.1. Схемы механизмов главного движения.
а,б,г – с передачей вращения на вал инструмента через ременную передачу;
в – непосредственным соединением инструмента с двигателем;
е – с вращением заготовки,
д – со сложной кинематической схемой,
ж, з – с фрикционной связью шкивов и гибкого инструмента (пилы, шкурки и т.п.);
и, к, л – кривошипно-ползунный механизм;
м – с реечным механизмом и реверсивным двигателем;
1 – направляющие, 2 – суппорт, 3 – кривошипно-ползунный механизм, 4 – зубчатое колесо.
Возвратно-поступательное движение пильной рамки осуществляется за счет вращения двигателем кривошипного вала (рис. 1, и) посредством вращения зубчатого колеса 4, соединенного с рейкой суппорта 2 (рис. 1, м) или путем вращения маховика кривошипно-ползунного механизма 3, соединенного с суппортом 2, перемещающимся по направляющим 1 (рис. 1,к, л). По этим схемам работают шпонострогальные станки.
Механизмы подачи (рис. 2) по принципу действия делятся на механизмы с жесткой и фрикционной связью. В механизмах с жесткой связью перемещение осуществляется цепной, зубчатой, реечной, винтовой передачами или пневмогидроцилиндрами, а в механизмах с фрикционной связью — за счет сил сцепления между заготовкой и органами подачи: вальцами, конвейером и т. п.
При этом возможно проскальзывание заготовки относительно подающего органа. В каждой группе механизмов содержится большое количество конструктивных. Механизмы подачи приводятся в действие или от отдельного привода или от общего привода станка. Часто в качестве привода механизмов подачи используют пневмо- или гидроцилиндры (рис. 2, а, д, е).
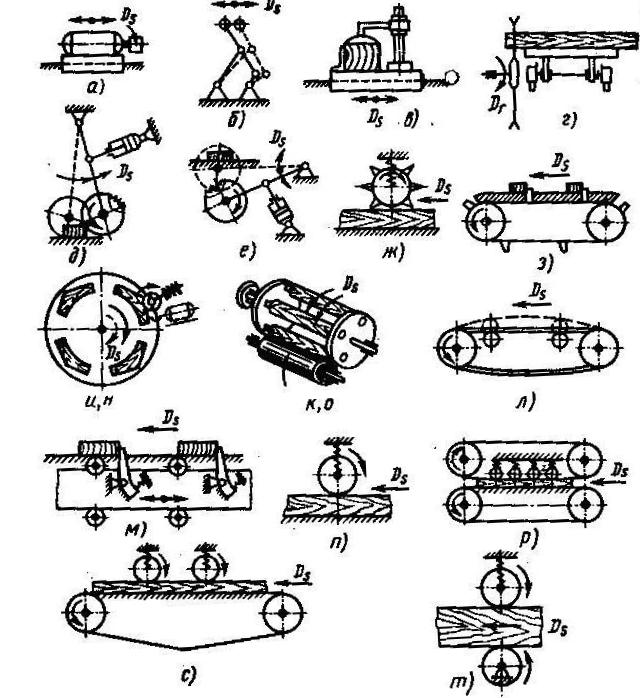
Рис. 2. Схемы механизмов подачи:
а, б, в, г — прямолинейного перемещения суппорта (а), шарнирно-рычажной системы (б), стола (в), каретки (г); д, е — криволинейного перемещения маятникового типа (д) и балансирного (е); ж, з, и, к — непрерывного движения вальцового (ж), конвейерного (з), карусельного (и) и барабанного (к) типа; л, м, н, о — шагового перемещения с конвейером (л), штангами (м), карусельным столом (н), барабаном (о); п, р, с, т — фрикционного типа с вальцами (п, м), гусеничным конвейером (р), с вальцами и конвейером (с).